
Alphabet的自动驾驶汽车研究部门Waymo今天详细介绍了一个系统-渐进人口基础增强(PPBA)-它声称在改善自动驾驶系统性能的同时减少了训练它们所需的数据量。Waymo说,具体来说,PPBA增强了其汽车的目标检测能力,同时降低了成本并加快了培训过程。
虽然还处于初期,但这种方法可以提高Waymo车辆在挑战性驾驶场景下的耐用性-即使车队仍因COVID-19大流行而停飞。
Waymo的汽车在现实世界和模拟中遇到的情况使该公司的工程师有机会训练Waymo Driver(Waymo的全栈无人驾驶平台)所基于的模型。作为背景技术,Waymo Driver(现在已经是第五代产品)依赖于定制的激光雷达,摄像机和雷达套件,以及使其能够解释和响应传感器数据的算法。
通常,要确保这些模型具有高度通用性,就需要收集大量多样的培训数据并招募人员来手动注释数据。但是PPBA通过发现合成其他数据的方法来自动执行整个过程。
PPBA借鉴了AutoAugment的线索,该项目是Google Research和Google Brain的一个项目,该项目使用各种图像增强操作(例如旋转,裁剪,图像镜像和色彩偏移)来变形和变换数据。通过强化学习训练,它为给定的样本集选择最佳的强化策略(即,强化操作的组合),同时降低了搜索策略的计算成本。
PPBA还建立在Waymo现有数据增强工作的基础上。在2019年初,该公司开始将来自Google Brain和称为RandAugment的Google Research算法的技术应用于基于图像的分类和检测任务。Waymo报告说,其结果是,在多个分类器和检测器上实现了“重大”改进,包括那些有助于对异物进行分类的对象,例如建筑设备和动物。
PPBA瞄准激光雷达,它通过用激光照射目标物体并测量反射脉冲来测量到目标物体的距离。除了3D空间信息外,来自激光雷达传感器的日志还包含诸如距离,操作强度和采样概率之类的参数。
为了发现针对点云数据集设计的策略,PPBA在包含八个操作的点云增强搜索空间上工作,每个操作都与概率和特定参数相关联:
- 原始数据样本
- 地面真相增强(其参数表示对车辆,行人和骑自行车的人进行采样的概率)
- 随机翻转
- 世界缩放
- 全局平移噪声(其参数用于确定某些坐标上平移操作的失真幅度)
- 视锥退出
- 截锥体噪音
- 随机旋转
- 随机掉落激光点
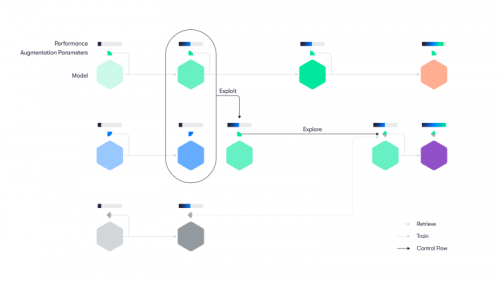
受生物进化的启发,PPBA学会了从多个搜索空间开始,然后用“后代”替换效果不佳的搜索空间来优化扩增策略。在每次迭代中,它都采用过去迭代中发现的最佳参数。
Waymo声称,PPBA在实验中实现了整个检测架构的性能改进,并节省了成本,因为PPBA仅需要标记的激光雷达数据进行培训。Waymo在博客中写道:“我们的实验表明,通过对激光雷达数据应用自动数据增强,我们可以显着改善3D对象检测,而无需进行额外的数据收集或标记。” “在基准3D检测模型上,我们的方法比不使用增强方法的数据效率提高了10倍,使我们能够训练带有更少标记示例的机器学习模型,或者使用相同数量的数据以更低的价格获得更好的结果。成本。”
Waymo并不是第一次使用AI来加速后端任务,例如数据扩充和搜索。
Waymo之前 与DeepMind 合作进行了基于人群的培训(PBT),该培训成功地将行人,自行车和摩托车驾驶员识别任务中的误报率降低了24%,同时将培训时间和计算资源减少了一半。经过初步研究后,PBT直接与Waymo的技术基础架构集成在一起,从而使整个公司的研究人员只需单击一下按钮即可将其应用。
最近,Waymo撤消了Content Search的帷幕,Content Search利用了与支持Google Photos和Google Image Search相似的技术,使数据科学家可以快速定位Waymo的驾驶历史和日志中的几乎所有对象。该公司表示,这为整个系统的“许多改进”做出了贡献,包括发现带有孩子要踏上人行道的校车,乘坐电动踏板车的人和过马路的猫的能力。
